
Chitu Trackless AGV
Application Videos
-
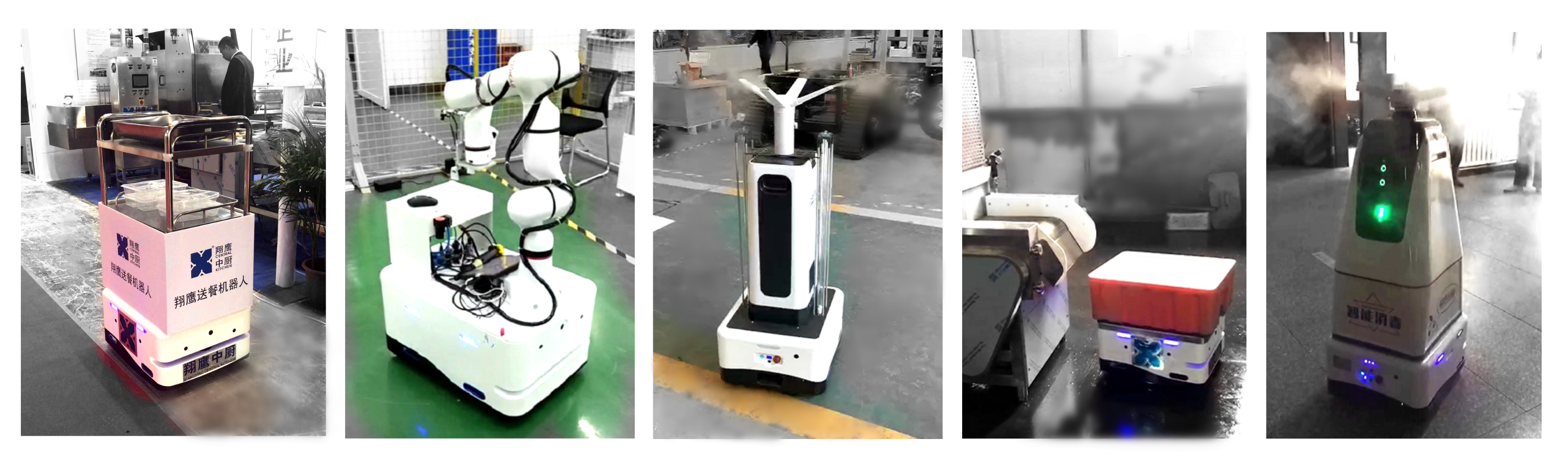
Multifunction AGV
Chitu can be responsible for the distribution of materials during the production process, with flexible trajectories and easy deployment, suitable for flexible production scenarios, replacing the frequent picking and feeding work of staff, and the virtual trajectory facilitates timely adjustment of delivery routes and stations. Suitable for scenes such as electronics factories, dust-free workshops, assembly lines, etc.
-
Chitu workshop logistics
Chitu can be responsible for the distribution of materials during the production process, with flexible trajectories and easy deployment, suitable for flexible production scenarios, replacing the frequent picking and feeding work of staff, and the virtual trajectory facilitates timely adjustment of delivery routes and stations. Suitable for scenes such as electronics factories, dust-free workshops, assembly lines, etc.
-
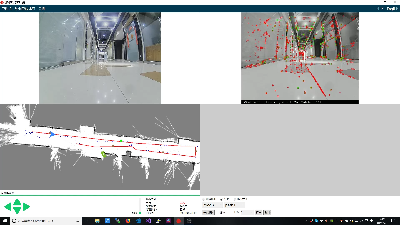
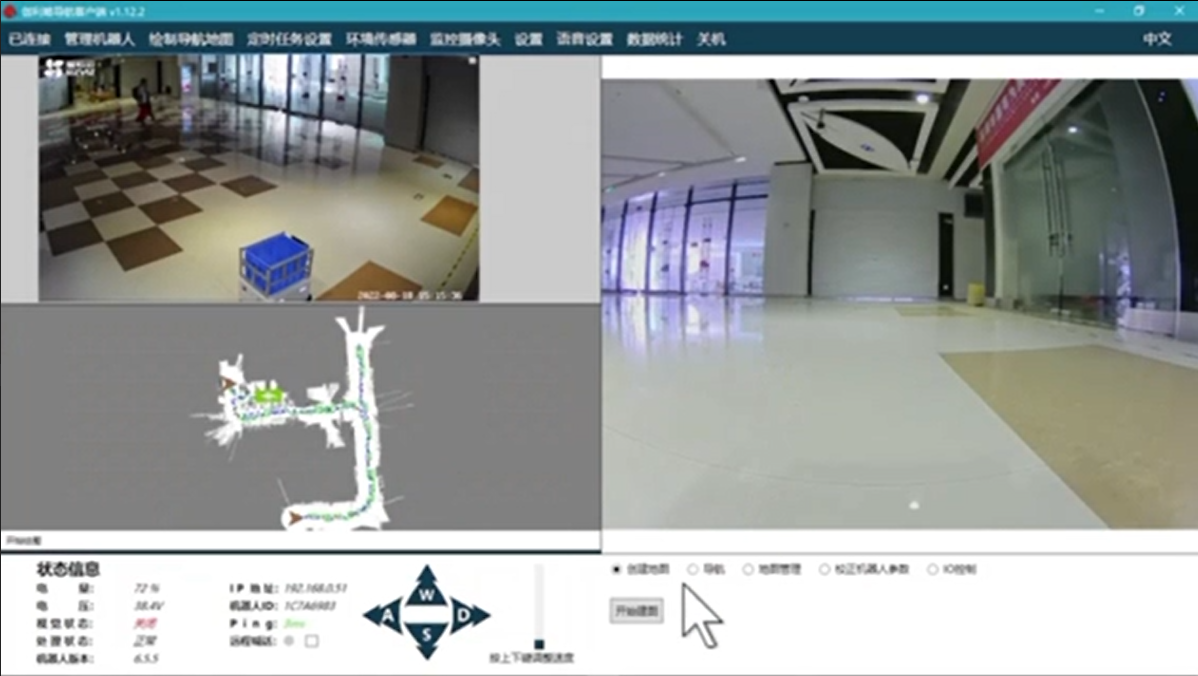
Details of Chitu client
The robot can be easily controled by the Chitu client. This video shows how to use the Chitu client to control robot navigation after creating map
-
Security inspection robot
The security/inspection robot is a high-performance, intelligent security inspection robot that is adapted to various surveillance cameras that support the onvif protocol to achieve intelligent inspection and monitoring. It can also be equipped with various dangerous gas detection devices to achieve multiple tasks. Security inspection and monitoring of various application scenarios.
-
Quick introduction to using Chitu
The robot can be easily controled by the Chitu client. This video shows how to use the Chitu client to control robot navigation after creating map
-
Latent lifting AGV
The latent lifting AGV is a powerful automatic navigation transport vehicle with excellent performance and multiple advanced functions. Using vision + radar hybrid navigation technology, it can accurately navigate and walk autonomously, and can be used with lift control to realize cargo handling.





Chitu is an automatic delivery robot developed by the Bluewhale Robot, and Chitu uses the automatic driving technology, which is simple to use, stable, reliable and flexible movement. Chitu can achieve automatic delivery of goods in large shopping malls and industrial parks. The way Chitu are used is also very simple. First, remote control of the Chitu robot in the working environment to walk through, so that the robot remember the surrounding environment. At this point, the robot automatically creates a map of the surrounding environment. Then you can draw the route that you wants the robot to walk through in the map created by the robot. After clicking Start button, the robot will move automatically along the path you draw.
Usecases




Product Info
-
Basic Info
Product number: CT-BY-001-100
Dimensions: L600mm*W500mm*H260mm(Shelves not included, shelves can be customized)
Navigation: Supports visual + LiDAR hybrid navigation
Drive mode: differential drive
Walking speed: 0 ~ 1.8 M/S
Turning radius: supports 90°/180°/360° rotation in place
Rated load: 100kg
Machine weight: 35kg
Climbing without load: more than 15°
Minimum passing width: 600mm -
Operation mode
No tracks required, hybrid navigation method
Automatic path planning for virtual road networks
Supports multi-functional driving such as forward, backward, in-situ rotation, and bifurcated turns.
Support cross-floor and elevator control -
Movement accuracy
Navigation accuracy ±5mm
Angle error <= 5° -
Control methods
Virtual road network to avoid accidental entry, Windows Client Remote Control
Mobile Client Remote control
Voice control -
Auto Charging
Equipped with automatic charging module to charging in low power automatic; allow manual charging
36V 18AH lithium battery, can run continuously for 4-8 hours (large-capacity battery can be customized)
Complete charging in 2 hours -
Safty Ensurance
Obstacle sensors, contact bumpers and emergency stop buttons, triple obstacle avoidance methods
Automatically detour or re-route when encountering obstacles -
Slience
Using an all-in-one hub motor, the operation is smoother and almost noiseless.
-
Auxiliary interaction Features
Arrival audio, lighting tips, cloud recording walking path and remote voice control
Customization and development
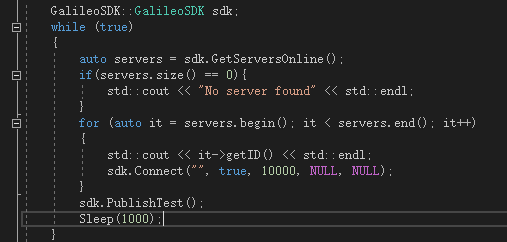
SDK support, supporting C++ C# Java Python multiple languages
The SDK can control and obtain the robot's state position and image information, and so on. Fully Control of the robot
Can be customized according to demand, such as adding surveillance cameras, robotic arms, carrier table and so on
