
BW-OLS01Automatic Charging Module for Robots
Application Videos
-
QR code automatic charging
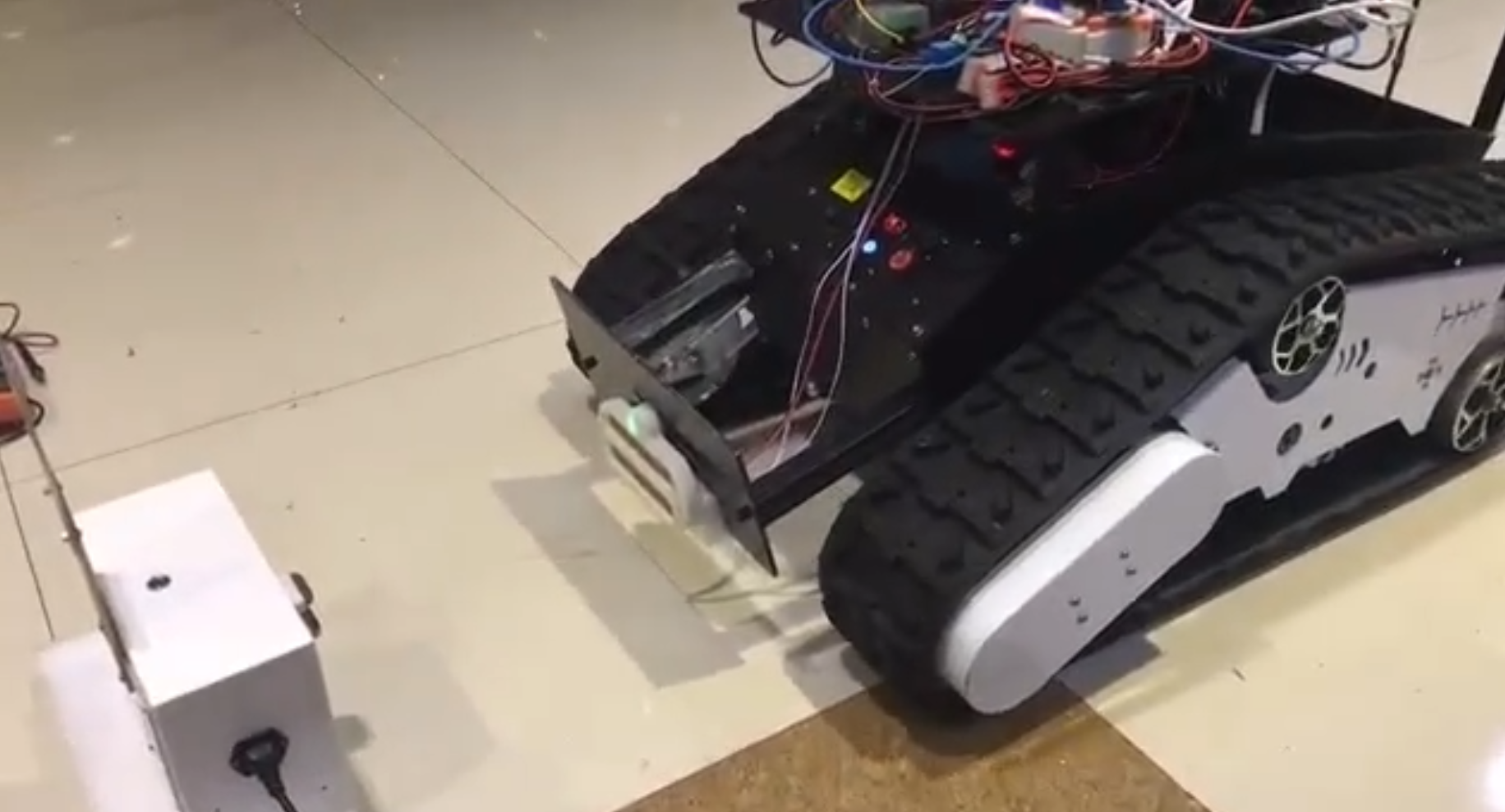
The Bluewhale automatic charging module uses the qr-code of the charging dock to locate, and automatic charge the robot. User only needs to place the charging dock in a corner, and fix the charging module in the proper position of the robot. When user sends a signal to the robot through a program to start charging, the robot will move automatically to the charging dock and begin charging.
-
IR automatic charging
The Bluewhale automatic charging module uses the infrared signal or qr code of the charging dock to locate the dock, and automatic charge the robot. The user only needs to fix the charging dock in a corner, and the charging module can be fixed in the proper position of the robot. When the user sends a signal to the robot to start charging through the program, the robot will begin to move automatically to the charging dock and begin charging.
-
QR code automatic charging
The Bluewhale automatic charging module uses the infrared signal or qr code of the charging dock to locate the dock, and automatic charge the robot. The user only needs to fix the charging dock in a corner, and the charging module can be fixed in the proper position of the robot. When the user sends a signal to the robot to start charging through the program, the robot will begin to move automatically to the charging dock and begin charging.



The Bluewhale automatic charging module uses the infrared signal or qr code of the charging dock to locate, and automatic charge the robot. User only needs to place the charging dock in a corner, and fix the charging module in the proper position of the robot. When user sends a signal to the robot through a program to start charging, the robot will move automatically to the charging dock and begin charging.
Features
-
Accurate
Almost 100% of the charge success rate -
Support ROS
The integration with ROS system makes it easier and quicker for users to use.
High scalability -
Easy to Use
The product structure is simple, and easy to added to your own robot. You can start using it with very little configuration -
Wide range of outputs
Supports 0-50v, 0-10A charging output
Hardware Info
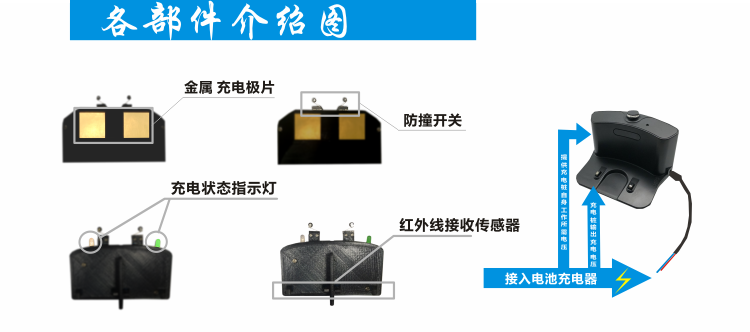
The parts of the automatic charging module are shown in the figure above. The charging module is divided into two parts: charging base and charging dock.
The charging base contains an electrode, a crash switch, and a charge status indicator. When charging is complete, the indicator light from the charging dock changes from red to green.
Installation Requirements

Charging Dock Mounting requirements: Mount the charging base at the bottom of the robot. Adjust the height so that it can touch the charging dock smoothly
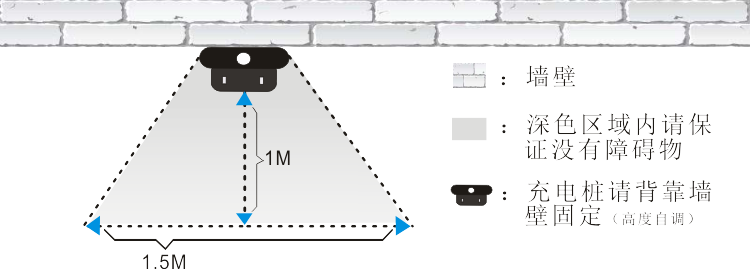
The charging dock is fixed against the wall with the external power supply. At the same time, make sure the robot can move freely in the area as shown in the image.
For detailed IR installation and usage instructions, seebw_auto_dock: How to use and implement the automatic charging package
For detailed QR code installation and usage instructions, seebw_auto_dock: How to use and implement the automatic charging package








