
BW-OLS01机器人底盘自动充电模块
应用视频
-
二维码自动充电
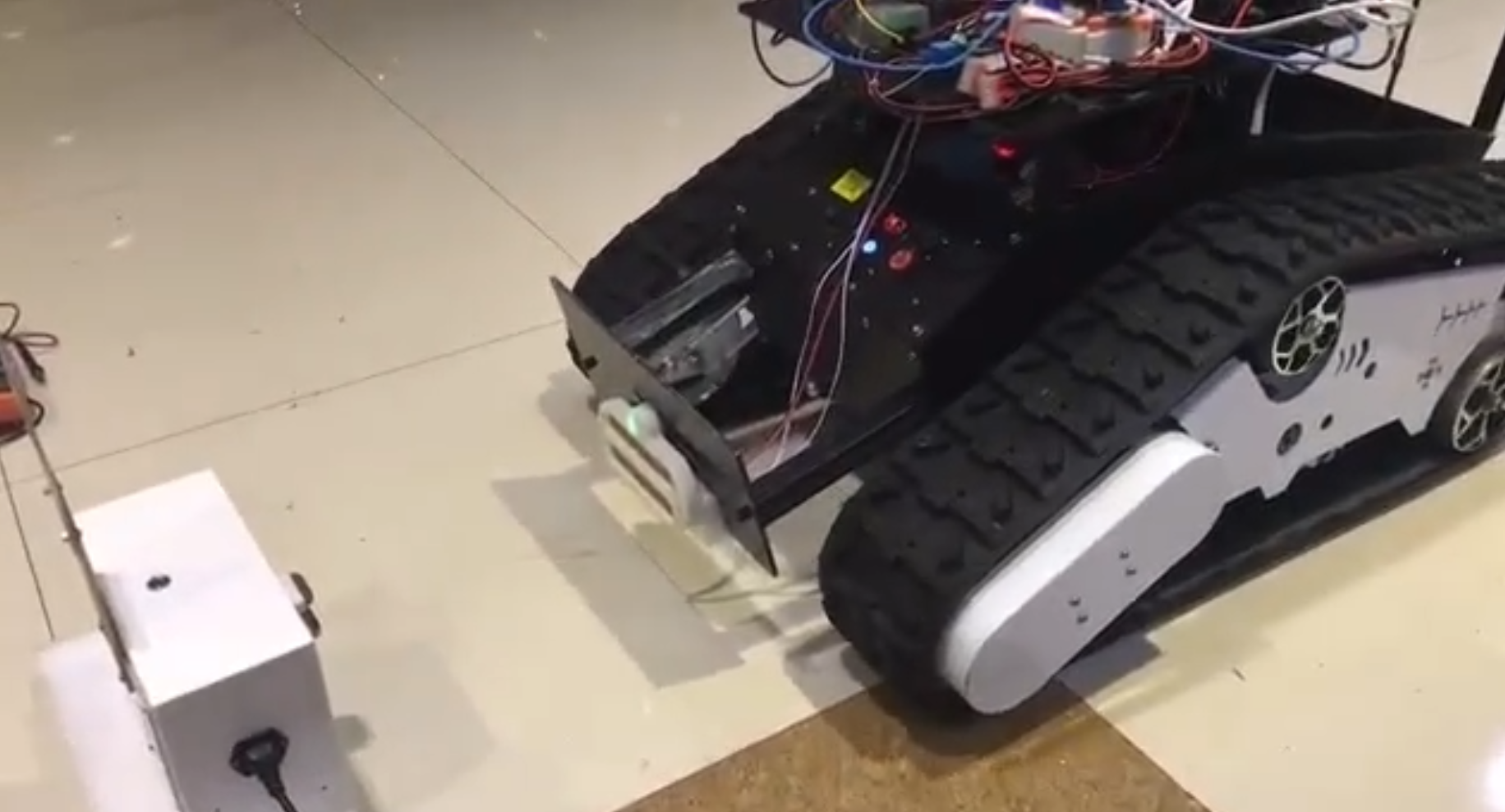
蓝鲸自动充电模块利用充电桩的二维码进行定位,实现机器人底盘的自动充电功能。用户只需要分别将 充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送 开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。
-
红外自动充电
蓝鲸自动充电模块利用充电桩的红外信号或者二维码进行定位,实现机器人底盘的自动充电功能。用户只需要分别将充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。
-
二维码自动充电
蓝鲸自动充电模块利用充电桩的红外信号或者二维码进行定位,实现机器人底盘的自动充电功能。用户只需要分别将充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。



蓝鲸自动充电模块利用充电桩的红外信号或二维码进行定位,实现机器人底盘的自动充电功能。用户只需要分别将 充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送 开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。
功能特点
-
准确度高
几乎可以实现百分之百的充电成功率 -
支持ROS
通过和ROS系统的集成,使用户使用起来更加方便快捷
极高的扩展性 -
使用方便
产品结构简单,可以轻松的加入到自己的机器人底盘中,只需简单配置即可使用 -
广泛的输出范围
支持0-50V, 0-10A的充电输出
硬件说明
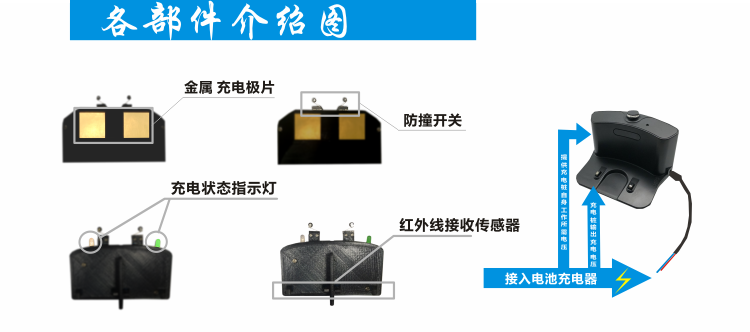
自动充电模块各部分如上图所示。充电模块分为充电底座和充电桩两部分。
当充电完成时,充电底座的指示灯会由红色变成绿色。
安装要求

充电底座安装要求: 将充电模块安装在机器人尾部。调整好合适的高度,使其能够正常触碰到充电桩
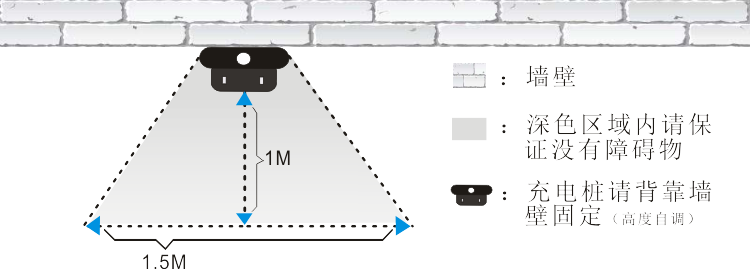
充电桩靠墙固定,插入外接电源。同时保证如图所示的区域范围内机器人可以自由移动。
红外版本详细的安装和使用说明请参见bw_auto_dock自动充电功能包的使用和实现原理
二维码版本详细的安装和使用说明请参见二维码bw_auto_dock自动充电功能包的使用








