Xiaoqiang XQ4-PROGeneral purpose ROS develping platform
i7
8GMemory
128G SSD
LIDAR
RGBD
Mono Camera
Application Videos
-
LIDAR
real-time map and location of lidar
When Xiaoqiang is equipped with the laser radar, it can make environment mapping and robot navigation easy and quick. In the use of LIDAR, the robot is required to provide more accurate odometer information. Xiaoqiang's odometer is fused with a gyroscope and encoder, with high accuracy. From this video, As we can see that in a large range (200mx400m) the map built by Xiaoqiang is still very accurate.
-
Visual navigation
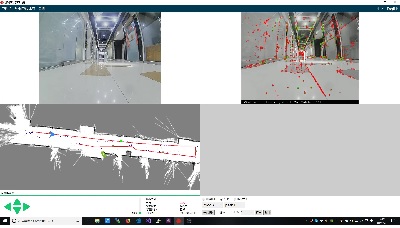
Visual Navigation
Xiaoqiang uses the camera to collect the ambient image and uses its powerful computational ability to identify the 3D structure of the environment. The red and green dots in the video are the environmental feature points that it recognize. The map in the lower left corner of the video is its identified environment. As we can see that Xiaoqiang can run the Visual Slam program smoothly, and provide very accurate positioning information.
-
RGBD
RGBD
Obstacles are randomly placed on the ground. Xiaoqiang obtains the information of the obstacle through the depth camera. The green curve in the video is the target line and location of Xiaoqiang. Xiaoqiang planning its path in real time according to the situation of obstacles. That is, the blue curve in the video. It can be seen that even in a very complex obstacle environment, Xiaoqiang can move smoothly to the target position.
-
Robot Arm Example
Xiaoqiang has extensive extensibility and can be equipped with a robotic arm. Xiaoqiang controls the robotic arm, and grab the cup in front of it
-
Inertial navigation
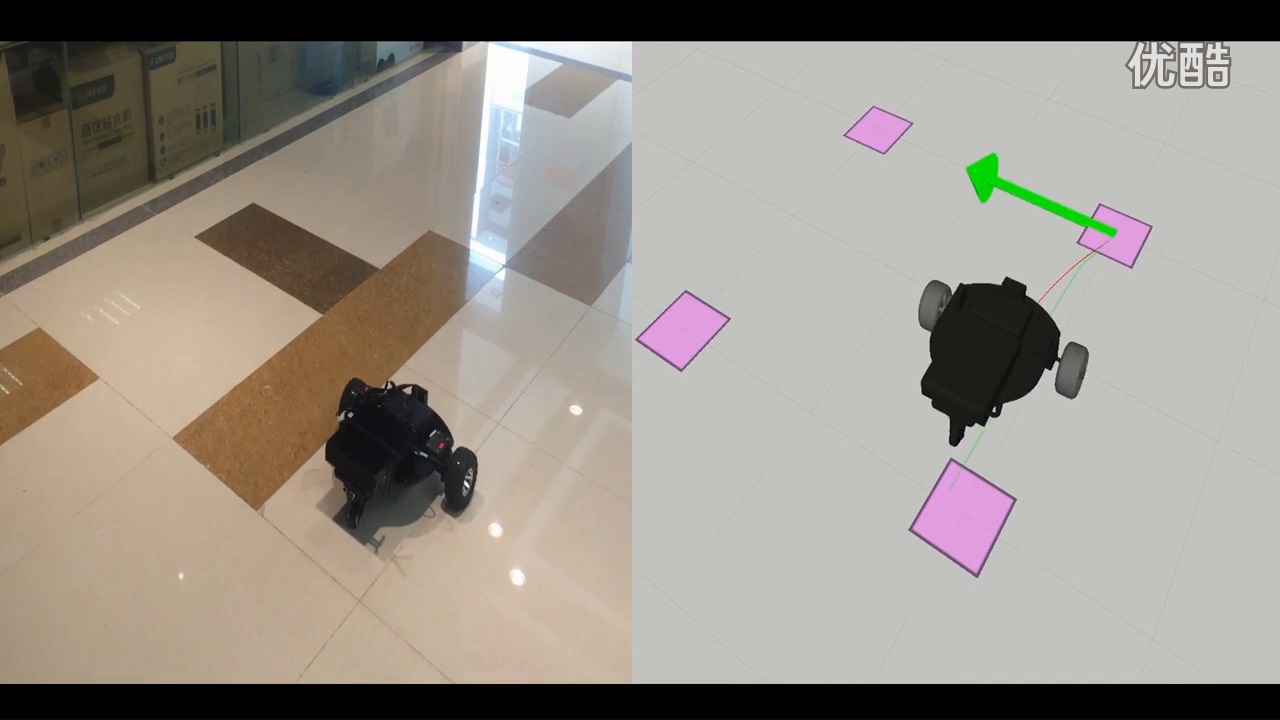
Inertial navigation
Inertial navigation is to use only the information provided by the car'sown gyroscope and encoder for navigation. The car in the video walked a 1M x 1M square under the control of the inertial navigation program.The image on the left is the actual movement of the car, and the right is the real-time position display of the car in the computer interface.
-
Speech recognition and follow
Speech recognition and follow
Xiaoqiang recognizes target's voice commands and then initiates the following program. Follow the movement of the target.





Xiaoqiang is a general purpose ROS develping platform. It has powerful computational power, long battery endurance and the nimble movement ability. Xiaoqiang is very suitable for developmenting the Ros navigation and the computer vision algorithm. Xiaoqiang has four-wheeled structure, the front two active wheels, and two omni-directional wheels on the back. Such a structure can guarantee the accuracy of the turning angle. The wheel used the rubber material which is not easy to skid to ensure the accuracy and stability of the movement again. Xiaoqiang's main controller is a i7 processor mini computer, contains 8G memory and 128G solid-state drives. This hardware configuration guarantees the strong compute ability of the Xiaoqiang. The battery is 12V 20AH lithium polymer battery, which can be guaranteed to be used for seven hours continuously.
Document support
- 1. Basic Operation Introduction
- 2. The usage of bluewhale software and configuration of ROS startup service
- 3. Use 3D model of XiaoQiang in rviz
- 4. Inertial navigation test
- 5. Xiaoqiang remote control android client
- 6. Xiaoqiang remote control window client
- 7. Control Xiaoqiang with a ps3 joystick
- 8. Play with Kinect1 in ROS
- 9. Change kinect angle with rostopic
Hardware Info
-
i7 processor 1.8GHz CPU Turbo 3.0GHZ
8G Memory
128G SSD
-
The power supply battery is 12V 20AH polymer lithium battery.
Rated Rated output current is 5 A, output power 60W. Xiaoqiang can be used for up to 7 hours under high power usage. -
Max Speed: 0.8m/s
Maximum Acceleration: 1.5m/s^2
Max Angle Speed: 230 deg/s
Maximum angular acceleration: 660 deg/s^2
-
8 USB with four USB3.0 and four USB2.0
60fps 178° camera
MPU9250 9-axis high-precision gyroscope
Maximum load:15kg








