Galileo navigation systemVision and LIDAR fusion positioning navigation system
Application Videos
-
Navigation Application
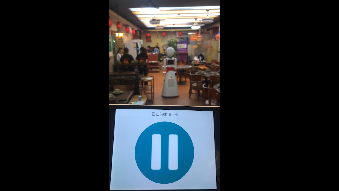
Galileo navigation system can be easily integrated into your robot, giving your robot the ability to automatically navigate and move.This is an application video of a servicebot with Galileo navigation system. Users can easily control the robot through the app.
-
Navigation Application
Galileo navigation system can be easily integrated into your robot, giving your robot the ability to automatically navigate and move.This is an application video of a servicebot with Galileo navigation system. Users can easily control the robot through the app.
-
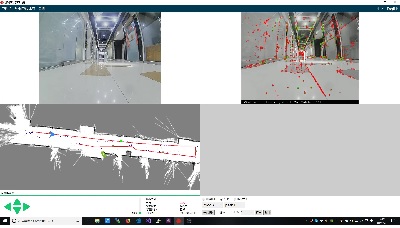
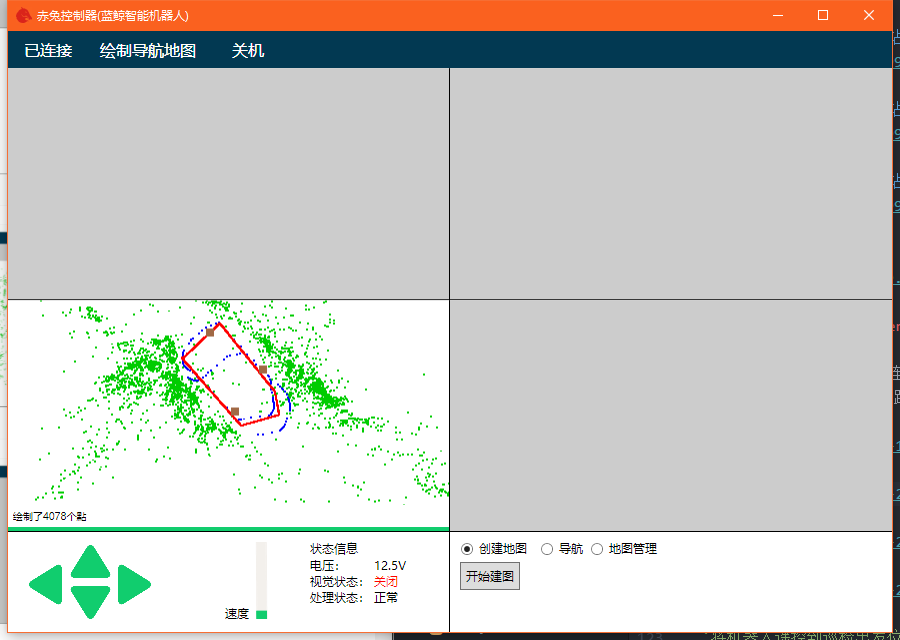
Galileo Client Navigation Demo
This video shows the usage Galileo system. The red and green dots in the upper right image of the video are the feature points identified by the Galileo navigation system. The map on the lower left is a map created by Galileo. The triangle icon on the map marks the position of the current robot. Through the client we can control the robot to move to a specific target point.
-
Galileo inspection case
The Galileo navigation system supports the functions required for patrol scenes, can be equipped with mature third-party surveillance cameras, and supports zooming and remote control of PTZ. Support cloud remote control, support timing cruise, support environmental detection (temperature and humidity, smoke, combustible gas, etc.), with alarm prompt function. Autonomous navigation and automatic charging. Support outdoor 3D radar sensor and visual navigation function. With task statistics function, task reports can be generated automatically.
-
Navigation system accuracy test video
Galileo visual navigation system indoor repeated positioning accuracy reliability test, this video crawler vehicle weighs 300kg, the car body is wide, and the control is difficult. The pure visual navigation passability test performs well. The actual error is the control error, the mechanical error, and the cumulative positioning error. In this video, it can be seen that the positioning error of the visual navigation is very small.
-
Multi-sensor fusion navigation scheme for outdoor manned platform.
Multi-sensor fusion navigation scheme for outdoor manned platform.
-
Navigation system accuracy test
Navigation system accuracy test.
-
Vision + radar fusion guidance and control scheme for outdoor distribution robots
Vision + radar fusion guidance and control scheme for outdoor distribution robots
-
Night patrol scene supporting 3D radar navigation
Night patrol scene supporting 3D radar navigation








Galileo navigation system is a highly cost-effective, modular robot positioning and navigation solution. The system employs multi-sensor fusion technology, boasting high precision and stability. It is suitable for various environments, including open spaces, monotonous areas, highly repetitive settings, and dynamic environments. Whether indoors or outdoors, the Galileo navigation system can provide accurate navigation. It can even facilitate movement from one floor of a building to another floor in a different building within the same complex.Moreover, the Galileo navigation system is not just a navigation system; it also offers a variety of new functionalities for your robots, such as IO control, camera control, lifting control, automatic charging, scheduled patrols, graphical programming, remote video transmission and two-way communication, multi-floor navigation and elevator control, multi-robot coordination, cloud control, beyond-visual-line-of-sight (BVLOS) remote control, voice recognition, face recognition, and target following. These features help accelerate the deployment of your projects and quickly meet customer needs.The Galileo navigation system also provides a rich set of communication protocol interfaces, such as HTTP, WebSocket, and Modbus. More importantly, its backend API is fully open-source, allowing for personalized customization and ensuring that you have control over the robot's code.
Features

-
Multiple sensor fusion Navigation
Integrated vision navigation, lidar navigation and other sensor positioning and navigation solutions. More stable and reliable. -
versatile functions
Equipped with a variety of features, such as peripheral control, multi-robot collaboration, remote two-way communication, elevator control, and more—there are many more features waiting for you to discover. -
Easy to Use
The Galileo navigation system provides a user-friendly client. The robot can be easily controlled even if the user does not understand the navigation technology. -
Rich Documents
From the Client software user manual to API calls and protocol descriptions, the Galileo navigation system documentation covers every corner, providing support for your development and use. -
Wide range of scenarios
Galileo navigation system is suitable for indoor service robot, industrial AGV, patrol security robot and many other scenarios.
Hardware and environmental requirements
Hardware requirements
-
Motor
The brush motor requires an encoder, and the brushless motor can have no encoder but requires a hall sensor
-
Gyroscope
The current angle information of the robot needs to be provided through the gyroscope. If you use our motor drive (built-in 9-axis gyroscope), you don't need to provide it.
-
Odometry
If there is odometer data in ROS, there is no requirement for motors and gyroscopes
Environmental requirements
-
Terrain requirements
Flat environment, there is no large angle of uphill and downhill. For example, mountain environment can not meet the conditions of use.
More than navigation
-
Graphical programming
-
Scheduled patrol
-
Open source
-
Speech recognition
-
Face recognition
-
Target following
-
Auto Charging
-
Peripheral control
-
Multi-robot
-
Cloud control
-
Beyond-visual-line-of-sight (BVLOS) remote control
-
Elevator communication
Customization and development
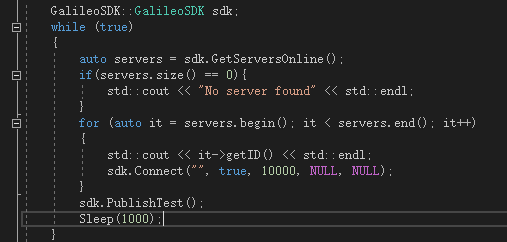
Open API, supporting HTTP Websocket Modbus multiple protocols
The API can control and obtain the robot's state position and image information, and so on. Fully Control of the robot
View APIOur Customers







-
- Contact
- Email: yangle@bwbot.org
- Phone: 0755-84874837
- Wechat: 15890101831
- Address: Longgang District, Shenzhen, People's Republic of China
-
- Follow Us
- Github
- Scan QR Code
