伽利略导航系统视觉激光雷达融合定位导航系统
应用视频
-
导航应用实例
伽利略导航系统可以方便的集成到你的机器人当中,使你的机器人具有自动导航移动能力。此为视频一款搭载了伽利略导航系统的服务机器人的应用视频。用户可以通过app方便的控制机器人。
-
导航应用实例
伽利略导航系统可以方便的集成到你的机器人当中,使你的机器人具有自动导航移动能力。此为视频一款搭载了伽利略导航系统的服务机器人的应用视频。用户可以通过app方便的控制机器人。
-
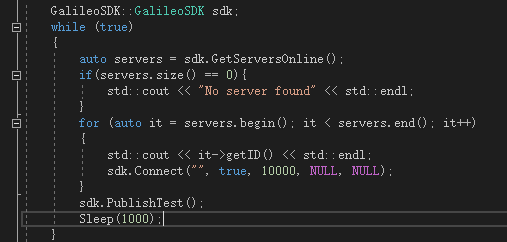
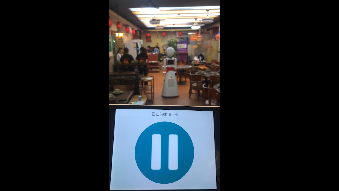
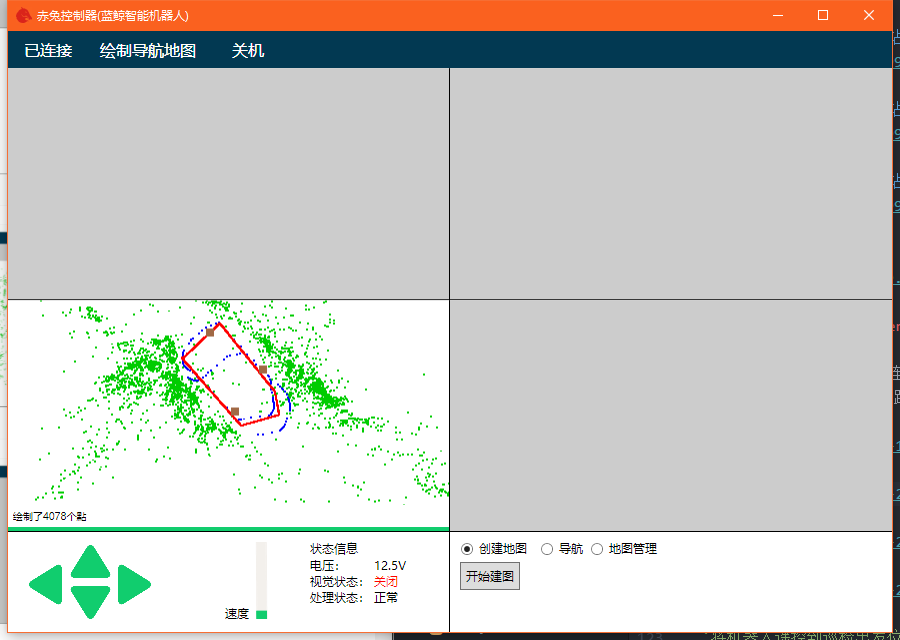
伽利略客户端导航演示
此视频演示了伽利略系统的使用方法。 视频中右上图像中的红色和绿色点为伽利略导航系统所识别的特征点。左下角地图是伽利略系统建立的地图。 地图上的三角形图标标志着当前机器人的位置。通过客户端我们可以控制机器人向特定的目标点移动。
-
伽利略巡检案例
伽利略导航系统支持巡逻场景所需功能,可搭配成熟第三方监控摄像头,支持变焦、遥控云台。支持云端远程控制,支持定时巡航,支持环境检测(温湿度、烟雾、可燃气体等),具有报警提示功能。 自主导航、自动充电。支持室外3D雷达传感器和视觉导航功能。具有任务统计功能,自动生成任务报表。
-
导航系统精度测试视频
伽利略视觉导航系统室内重复定位精度可靠性测试,本视频履带车自重300kg,车体较宽,控制难度大,纯视觉导航通过性测试表现良好,实际误差为控制误差,机械误差,定位误差累加,本视频可以看出视觉导航的定位误差很小。
-
室外载人平台的多传感器融合导航方案
室外载人平台的多传感器融合导航方案。
-
导航精度测试
导航精度测试。
-
室外配送机器人的视觉+雷达融合导控方案
室外配送机器人的视觉+雷达融合导控方案。
-
支持3D雷达导航的夜晚巡逻场景
支持3D雷达导航的夜晚巡逻场景。








伽利略导航系统是一款超高性价比的模块化机器人定位与导航解决方案。该系统采用多传感器融合技术,具有高精度和高稳定性的特点。它适用于各种环境,包括空旷环境、单调环境、高重复度环境和高动态环境。无论是室内还是室外,伽利略导航系统都能精准导航。甚至可以实现从一栋楼内的某层移动到园区内的其他楼内的某层。
此外,伽利略导航系统不仅是一个导航系统,还能为您的机器人提供多种新功能,例如IO控制、监控摄像头控制、顶升控制、自动充电、定时巡逻、图形化编程、远程图传和双向通话、多楼层导航和电梯控制、多机器人协同、云端操控、超视距遥控、语音识别、人脸识别以及目标跟随等。这些功能能够帮助您的项目更快落地,并迅速满足客户的需求。
伽利略导航系统还提供了丰富的通信协议接口,如HTTP、WebSocket和Modbus。更重要的是,其后端API完全开源,方便您进行个性化定制,确保机器人的代码由您掌控。
产品特性

-
多种传感器融合导航
融合视觉导航,激光雷达导航等多种传感器的定位导航解决方案。更加稳定可靠。 -
功能多样
内置丰富功能,比如外设控制,多机器人协作,远程双向通话,电梯控制等等。更多功能等待你的发现 -
使用方便
伽利略导航系统提供了人性化的客户端。即使用户不了解导航技术,也能够轻松控制机器人。 -
文档丰富
从客户端软件使用手册到API调用和协议说明,伽利略导航系统文档全部覆盖。为您开发和使用提供保障。 -
场景广泛
伽利略导航系统适用于室内服务机器人,工业AGV,巡检安防机器人等多种场景。
硬件和环境要求
硬件要求
-
电机
有刷电机需要有编码器,无刷电机可以没有编码器但需要有霍尔传感器
-
陀螺仪
需要通过陀螺仪提供机器人当前角度信息。如果采用我们的电机驱动(内置9轴陀螺仪)则可以不用。
-
里程计
如果有ROS中的里程计数据则对电机和陀螺仪没有要求
环境要求
-
地形要求
平坦环境,不存在很大角度的上坡和下坡。比如山地环境无法满足使用条件。
不只是导航
-
图形化编程
-
定时巡逻
-
开放源码
-
语音识别
-
人脸识别
-
目标跟随
-
自动充电
-
外设控制
-
多机器人
-
云端操控
-
超视距遥控
-
电梯通信
文档支持
二次开发