Galileo navigation system
-
Navigation Application
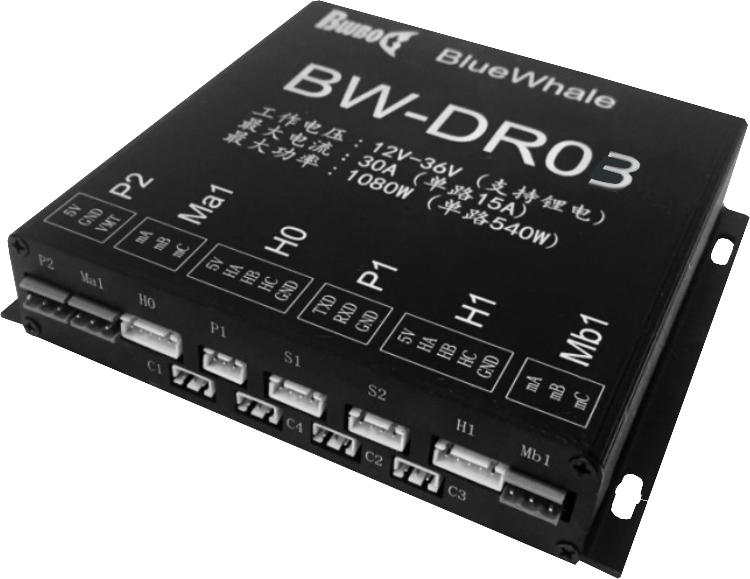
Galileo navigation system can be easily integrated into your robot, giving your robot the ability to automatically navigate and move.This is an application video of a servicebot with Galileo navigation system. Users can easily control the robot through the app.
-
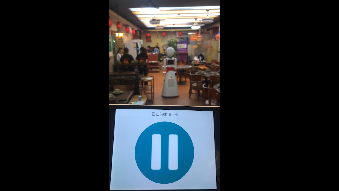
Night Test With Light
Galileo navigation system, as long as the use of visual navigation. So the light in the dark at night need to think of the use of complementary light. In this video we tested two ways to fill the light. One is the infra-red light, one is the visible light to fill, have achieved good results.
-
Galileo Client Navigation Demo
This video shows the usage Galileo system. The red and green dots in the upper right image of the video are the feature points identified by the Galileo navigation system. The map on the lower left is a map created by Galileo. The triangle icon on the map marks the position of the current robot. Through the client we can control the robot to move to a specific target point.

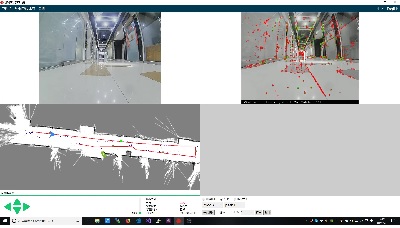
The Galileo system is a solution for robot positioning and navigation. It uses a variety of sensor fusion to locate, with high precision and good stability. Compared with the traditional positioning method, the Galileo navigation system does not need the user to lay the track, easy to use and low maintenance cost.
Know moreChitu automatic delivery robot
-
Multifunction AGV
Chitu can be responsible for the distribution of materials during the production process, with flexible trajectories and easy deployment, suitable for flexible production scenarios, replacing the frequent picking and feeding work of staff, and the virtual trajectory facilitates timely adjustment of delivery routes and stations. Suitable for scenes such as electronics factories, dust-free workshops, assembly lines, etc.
-
Chitu workshop logistics
Chitu can be responsible for the distribution of materials during the production process, with flexible trajectories and easy deployment, suitable for flexible production scenarios, replacing the frequent picking and feeding work of staff, and the virtual trajectory facilitates timely adjustment of delivery routes and stations. Suitable for scenes such as electronics factories, dust-free workshops, assembly lines, etc.
-
Details of Chitu client
The robot can be easily controled by the Chitu client. This video shows how to use the Chitu client to control robot navigation after creating map


Chitu is an automatic delivery robot developed by the Bluewhale Robot, and Chitu uses the automatic driving technology, which is simple to use, stable, reliable and flexible movement. Chitu can achieve automatic delivery of goods in large shopping malls and industrial parks. The way Chitu are used is also very simple. First, remote control of the Chitu robot in the working environment to walk through, so that the robot remember the surrounding environment. At this point, the robot automatically creates a map of the surrounding environment. Then you can draw the route that you wants the robot to walk through in the map created by the robot. After clicking Start button, the robot will move automatically along the path you draw.
Know moreXiaoqiang
-
real-time map and location of lidar
When Xiaoqiang is equipped with the laser radar, it can make environment mapping and robot navigation easy and quick. In the use of LIDAR, the robot is required to provide more accurate odometer information. Xiaoqiang's odometer is fused with a gyroscope and encoder, with high accuracy. From this video, As we can see that in a large range (200mx400m) the map built by Xiaoqiang is still very accurate.
-
Visual Navigation
Xiaoqiang uses the camera to collect the ambient image and uses its powerful computational ability to identify the 3D structure of the environment. The red and green dots in the video are the environmental feature points that it recognize. The map in the lower left corner of the video is its identified environment. As we can see that Xiaoqiang can run the Visual Slam program smoothly, and provide very accurate positioning information.
-
RGBD Barrier Avoidance
Obstacles are randomly placed on the ground. Xiaoqiang obtains the information of the obstacle through the depth camera. The green curve in the video is the target line and location of Xiaoqiang. Xiaoqiang planning its path in real time according to the situation of obstacles. That is, the blue curve in the video. It can be seen that even in a very complex obstacle environment, Xiaoqiang can move smoothly to the target position.


Xiaoqiang is a general purpose ROS develping platform. It has powerful computational power, long battery endurance and the nimble movement ability. Xiaoqiang is very suitable for developmenting the Ros navigation and the computer vision algorithm. Xiaoqiang has four-wheeled structure, the front two active wheels, and two omni-directional wheels on the back. Such a structure can guarantee the accuracy of the turning angle. The wheel used the rubber material which is not easy to skid to ensure the accuracy and stability of the movement again. Xiaoqiang's main controller is a i7 processor mini computer, contains 8G memory and 128G solid-state drives. This hardware configuration guarantees the strong compute ability of the Xiaoqiang. The battery is 12V 20AH lithium polymer battery, which can be guaranteed to be used for seven hours continuously.
Know moreHub motor driver
-
High Speed
The Bluewhale hub motor driver can drive the hub motor rotates at high-speed. In this video, XQ5 which uses this driver was rotating at high-speed.
-
Strong Power
Bluewhale Hub motor driver, maximum power 1080W, single 540W. The tank in the video is driven by this driver and it's powerful and unstoppable.
-
Linear Motion
The car in the video is driven by Bluewhale hub motor driver. From the video we can see that the car runs stable at high speed.



The Bluewhale drive controls motor speed with error less than 1%. Maximum power of the driver is 1080W (single 540W). Support operating voltage from 12V to 36V (support lithium battery). Our performance is better than other drives on the market especially in low-speed conditions. We also provide ROS driver for this drive. This allows you to control motor motion directly in ROS. This drive also provides 9-axis gyroscope data, odometer data which makes it easy to continue develop of ROS-related navigation programs. And the driver can be equipped with an optional infrared sensor and ultrasonic sensor. Bluewhale drive is the preferred solution for robotics development.
Know moreAuto Charging
-
QR code automatic charging
QR code automatic charging
The Bluewhale automatic charging module uses the qr-code of the charging dock to locate, and automatic charge the robot. User only needs to place the charging dock in a corner, and fix the charging module in the proper position of the robot. When user sends a signal to the robot through a program to start charging, the robot will move automatically to the charging dock and begin charging.
-
IR automatic charging
IR automatic charging
The Bluewhale automatic charging module uses the infrared signal of the charging dock to locate, and automatic charge the robot. User only needs to place the charging dock in a corner, and fix the charging module in the proper position of the robot. When user sends a signal to the robot through a program to start charging, the robot will move automatically to the charging dock and begin charging.


The Bluewhale automatic charging module uses the infrared signal of the charging dock to locate, and automatic charge the robot. User only needs to place the charging dock in a corner, and fix the charging module in the proper position of the robot. When user sends a signal to the robot through a program to start charging, the robot will move automatically to the charging dock and begin charging.
Know moreMore Products
-
XiaoQiang XQ-4 Pro

XiaoQiang XQ-4 Pro
XiaoQiang XQ-4 Pro -
XiaoQiang XQ-mini

XiaoQiang XQ-mini
XiaoQiang XQ-mini -
XiaoQiang XQ5

XiaoQiang XQ5
XiaoQiang XQ5
The Blue Whale Robot Case Store contains robots that can be used in various scenarios. Such as industrial AGV, food delivery robot, inspection robot and so on. You can find interested robots on this page to consult us.
Know more